
BiomechATRONIC Actuator
Integrated Brushless Outrunner Motor & Roller Screw Transmission
SolidWorks (Parts, Assemblies)
Finite Element Analysis (FEA)
Technical Drawings (CNC)
Generative Design (Fusion360)
Rapid Prototyping (FDM)
MIT Media Lab
Biomechatronics Group
Summer 2023
Parts & Subassemblies
-
![]()
Stator Subassembly
Shows the complete stack of the stator, with the Stator Shell as transparent. Features the R60 Stator, the Roller Bearings, and the Encoder PCB.
-
![]()
Rotor Subassembly
Shows the stack of the rotor, with the Rotor Standoff as transparent. Also includes an ABS standoff for the optical encoder track, the R60 Rotor, the roller screw, and crossed roller bearing.
-
![]()
Stator Shell
A decorative ABS outer layer for the actuator was formed using a cavity surrounding the Stator Roller Frame. Embellished with the Biomechatronics Group logo.
-
![]()
Stator Roller Frame
An Aluminum 7075-T6 generative design inspired frame to house roller bearings to mount to the prosthetic frame and featuring thread to connect to the Stator Main Frame.
-
![]()
Stator Main Frame
Houses the stator of the R60 T-Motor on an Aluminium 7075-T6 Frame. Features an angled cantilever to distribute and translate force outwards towards the bottom crossed roller bearing seat.
-
![]()
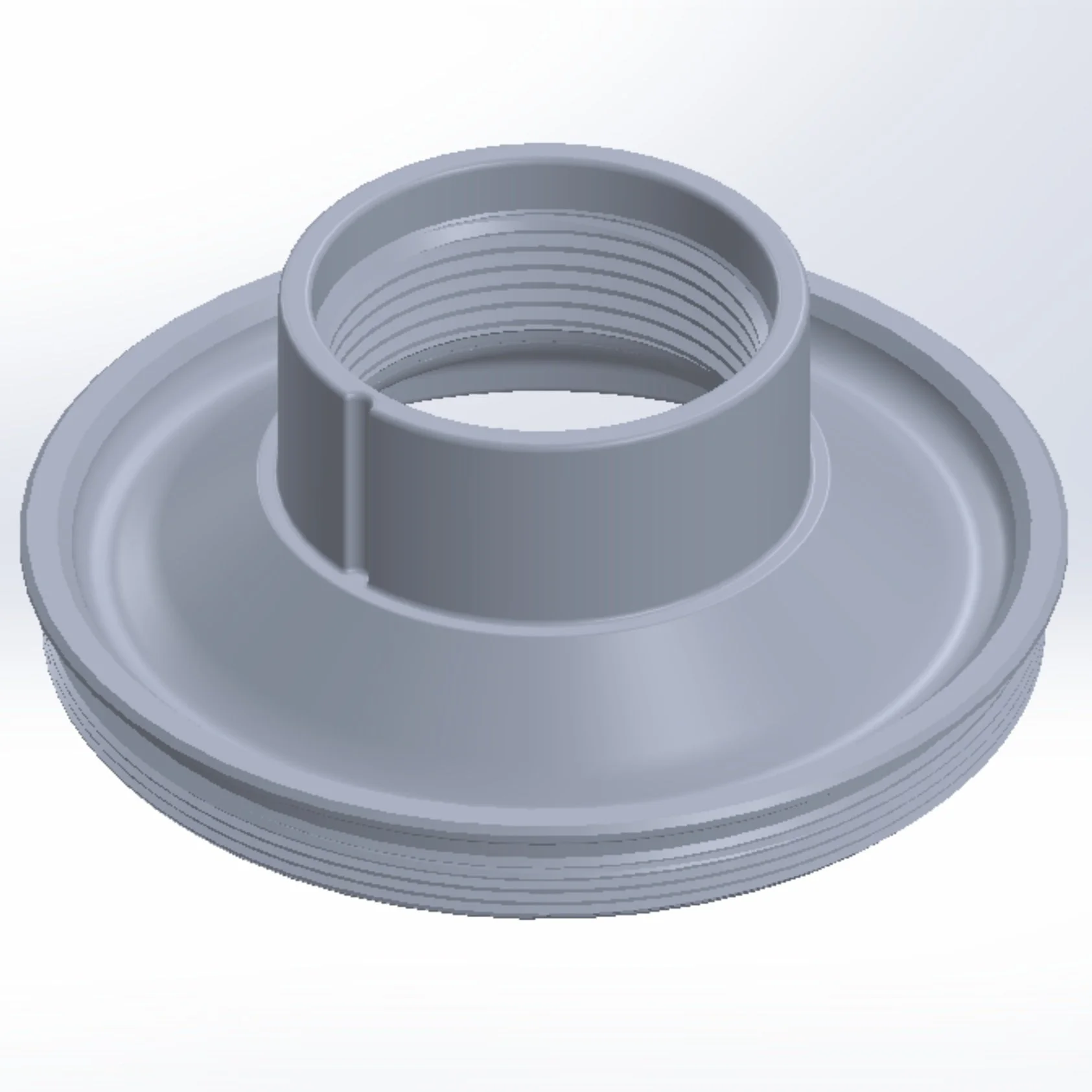
Stator Bearing Retaining Ring
Threaded Aluminium 7075-T6 retaining ring to clamp crossed roller bearing to the Stator Main Frame. Features 12 cantilevers around the base to optimize deflection, mass, and height.
-
![]()
Rotor Main Frame
The multi-purpose main body is constructed from Aluminum 7075 and features an inner slot for the roller screw transmission, an outer mount for the crossed roller bearing, and a variety of cantilevers to minimize deflection across the load paths.
-
![]()
Rotor Retaining Rings
The inner retaining ring concentrically holds the roller screw transmission, and the outer concentrically constrains the bearing. Outer also has threads to attach the Rotor Standoff, with careful attention to Saint-Venant's principle.
-
![]()
Rotor Standoff
A cast magnesium AZ91 extension to connect the rotor of the R60 T-Motor to the bearing retaining ring of the rotor. Careful attention was given to resonance frequency and minimizing load.
-
![]()
Rotor Adapter
An adapter to convert the radius of the R60 T-Motor to the radius of the Rotor Standoff. Also constructed from magnesium alloy. Attaches using temperature-sensitive Loctite adhesive.









Finite Element Analysis
Each component was individually verified to meet stress (< 200MPa) and deflection (<.05mm) criteria.
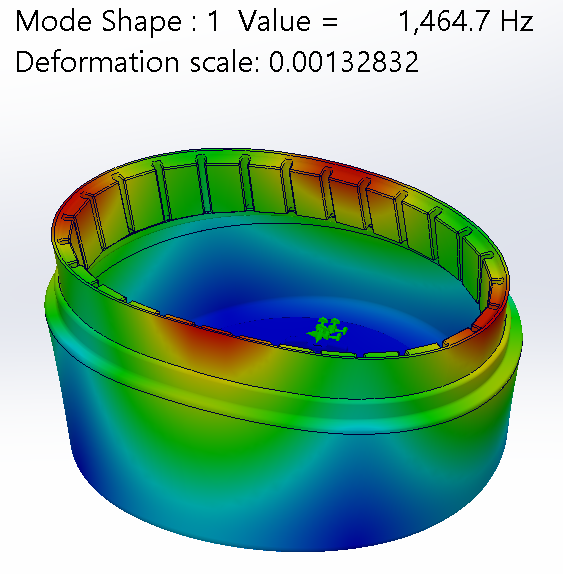
Rotor Standoff Resonance

Rotor Total Deflection

Stator Total Deflection

Rotor Total Stress

Stator Total Stress
Technical drawings










Generative Design

Ankle U-Bracket Frame,
Collaborated with Timber Carey


Stator Roller Frame, Generative Prototype

Stator Main Frame, Generative Prototype
U-Bracket Generative Model,
Loads and Moments
Rapid Prototyping (FDM)

Ideation, Iteration, Evolution [v1, v3, v8]

Generatively Designed U-Bracket

Project Details


-
Features a 300% increase in max torque output over the previous motor (1200Nm -> 4300Nm), with only a 20% increase in mass (450g -> 540g).
-
The motor is primarily constructed from Aluminum 7075-T6 for its light weight and high fatigue stress. In some cases, namely the rotor standoff, AZ91 magnesium alloy was preferred for a higher resonance frequency for a lighter weight.
-
Ph.D. Student Daniel Levine and Researcher Luke Hyman mentored me throughout the summer and taught me all the necessary design considerations. My designs for the actuator across eight iterations were independently developed. My designs were reviewed, critiqued, and approved by Dr. Chris Williams and Dr. Hugh Herr.
-
The Actuator and U-Bracket are currently being manufactured, and testing on the physical platform will begin in Fall 2023.